
Problem Statement
Given an n*m matrix grid where each cell contains either 0 or 1, determine the shortest distance between a source cell and a destination cell. You can move to an adjacent cell (up, down, left, or right) if the adjacent cell has a value of 1. The path can only be created out if cells containing 1. If the destination cell is not reachable from the source cell, return -1.
Examples
Example 1:
Input: grid = [
[1, 1, 1, 1],
[1, 1, 0, 1],
[1, 1, 1, 1],
[1, 1, 0, 0],
[1, 0, 0, 1]
]
source = [0, 1]
destination = [2, 2]
Output: 3
Explanation: The shortest path from (0, 1) to (2, 2) is:
Move down to (1, 1)
Move down to (2, 1)
Move right to (2, 2)
Thus, the shortest distance is 3. Example 2:
Input: grid = [
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 1],
[1, 1, 1, 1, 0],
[1, 0, 1, 0, 1]
]
source = [0, 0]
destination = [3, 4]
Output: -1
Explanation: Since, there is no path possible between the source cell and the destination cell, hence wer return -1.Different Approaches
1️⃣ BFS
Intuition:
The problem includes finding the shortest path from the source to destination which gives the idea of using a Dijsktra's Algorithm. But since, all the edges are of unit weight, instead of using Dijsktra's algorithm, a simple BFS traversal will get the job done.
This involves using the Queue data structure in place of the Min-heap data structure improving the time complexity. As BFS traversal visits all cells in a level order fashion, it will ensure that whenever the destination cell is reached, it is reached via the shortest path.
A distance array will be used to store the shortest path of the intermediate nodes from the source node which will also be used to identify if a shorter path is found leading to the destination cell.
How to traverse the neighbors efficiently?
The 4 neighbors of the current cell can be shown like this:
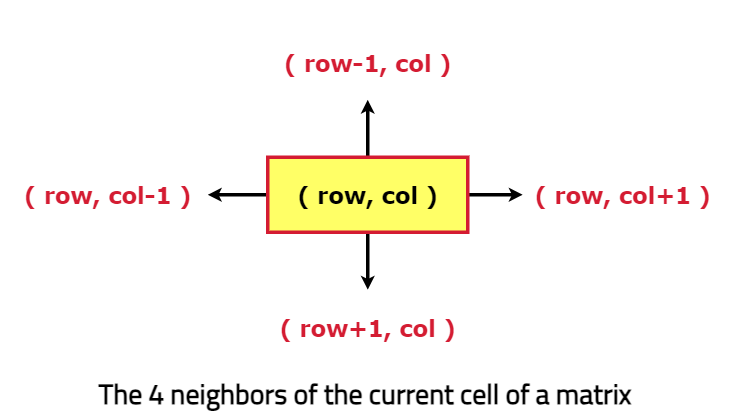
For efficient traversal of all neighboring pixels, the delRow and delCol arrays can be used where:
- delRow = {-1, 0, 1, 0}
- delCol = {0, 1, 0, -1}
Edge Cases:
- If the source and destination cell are identical, 0 can be returned as the answer.
- If no path from the source node to the destination node is found, -1 can be returned as the answer.
Approach:
- Create a queue to facilitate BFS traversal. Each element in the queue stores the distance from the source and the coordinates of the cell. Determine the dimensions of the grid.
- Create a distance matrix initialized to infinity to store the shortest distance from the source to each cell. Set the distance of the source cell to 0 and add it to the queue.
- While the queue is not empty, process each cell:
- Dequeue a cell and retrieve its distance and coordinates.
- Iterate through its neighbors using the delta row and column arrays.
- For each valid neighbor that contains a 1 and offers a shorter path, update the distance matrix.
- If the destination cell is reached, return the distance.
- If the queue is exhausted without reaching the destination, return -1, indicating the destination is not reachable.
Code:
#include <bits/stdc++.h>
using namespace std;
class Solution{
private:
// Delta row and column array
vector<int> delRow = {-1, 0, 1, 0};
vector<int> delCol = {0, -1, 0, 1};
// Function to check if a cell is valid
bool isValid(int &row, int &col,
int &n, int &m) {
// Return false if the cell is invalid
if(row < 0 || row >= n) return false;
if(col < 0 || col >= m) return false;
// Return true if the cell is valid
return true;
}
public:
/* Function to determine the shortest distance
between source and destination */
int shortestPath(vector<vector<int>> &grid, pair<int, int> source,
pair<int, int> destination) {
// Edge Case
if (source.first == destination.first &&
source.second == destination.second)
return 0;
/* Queue data structure to store the pairs of the
form: {dist, {coordinates of cell}} */
queue<pair<int, pair<int, int>>> q;
// Dimensions of grid
int n = grid.size();
int m = grid[0].size();
// Distance matrix
vector<vector<int>> dist(n, vector<int>(m, 1e9));
// Distane of source from itself is zero
dist[source.first][source.second] = 0;
// Add the surce to queue
q.push({0, {source.first, source.second}});
// Until the queue is empty
while (!q.empty()) {
// Get the element
auto it = q.front();
q.pop();
int dis = it.first; // Distance
int row = it.second.first; // Row of cell
int col = it.second.second; // Column of cell
// Iterate through all the neighbors
for (int i = 0; i < 4; i++){
// Coordinates of the new cell
int newRow = row + delRow[i];
int newCol = col + delCol[i];
/* Checking the validity of the cell and
updating if a shorter distance is found */
if (isValid(newRow, newCol, n, m) &&
grid[newRow][newCol] == 1 &&
dis + 1 < dist[newRow][newCol]) {
// Update the distance
dist[newRow][newCol] = 1 + dis;
// Return the distance is the destination is reached
if (newRow == destination.first &&
newCol == destination.second)
return dis + 1;
// Add the new cell to queue
q.push({1 + dis, {newRow, newCol}});
}
}
}
// If no path is found from source to destination
return -1;
}
};
int main() {
pair<int, int> source, destination;
source.first = 0;
source.second = 1;
destination.first = 2;
destination.second = 2;
vector<vector<int>> grid = {
{1, 1, 1, 1},
{1, 1, 0, 1},
{1, 1, 1, 1},
{1, 1, 0, 0},
{1, 0, 0, 1}
};
/* Creating an instance of
Solution class */
Solution sol;
/* Function call to determine the shortest
distance between source and destination */
int ans = sol.shortestPath(grid, source, destination);
cout << "The shortest distance from the source to destination is: " << ans;
return 0;
}
Complexity Analysis
- Time Complexity:
- Grid Traversal:
- In the worst-case scenario, every cell in the grid is visited exactly once.
- There are
n*mcells.
- There are
- In the worst-case scenario, every cell in the grid is visited exactly once.
- Neighbor Checks:
- For each cell, the algorithm checks at most 4 neighbors (up, down, right, left). Since this is a constant factor (4). It does not change the overall time complexity.
- Overall:
- The worst-case time complexity is therefore
O(n*m).
- The worst-case time complexity is therefore
- Grid Traversal:
- Space Complexity:
- Visited Matrix:
- A
n*mboolean matrix is used to keep track of visited calls, which requiresO(n*m)space.
- A
- Queue:
- In the worst-case (for example, when the grid is one large connected component), the queue could store a significant portion of the cells up to
O(n*m)in the worst-case.
- In the worst-case (for example, when the grid is one large connected component), the queue could store a significant portion of the cells up to
- Overall:
- The space complexity is also
O(n*m).
- The space complexity is also
- Visited Matrix: